Some type of spring-loaded buffer could be used to stop the trolley when it arrives at Bay 1 or Bay2. These buffers are used on railways to stop trains. A bumper would be needed on the trolley as well to take the impact from the buffer on the track. I envisage that the trolley will be travelling quite slowly so the impact shouldn't be too great.
A dock bumper could be used as well. Here is an image of a dock bumper used at docking bays for trucks [27].
Another option is to use a mechanical stop on the track itself to stop the wheel. Here is an image of a mechanical stop used on tracks [28]. The trolley could tilt on impact though.
A block could be also be used on the track [28].
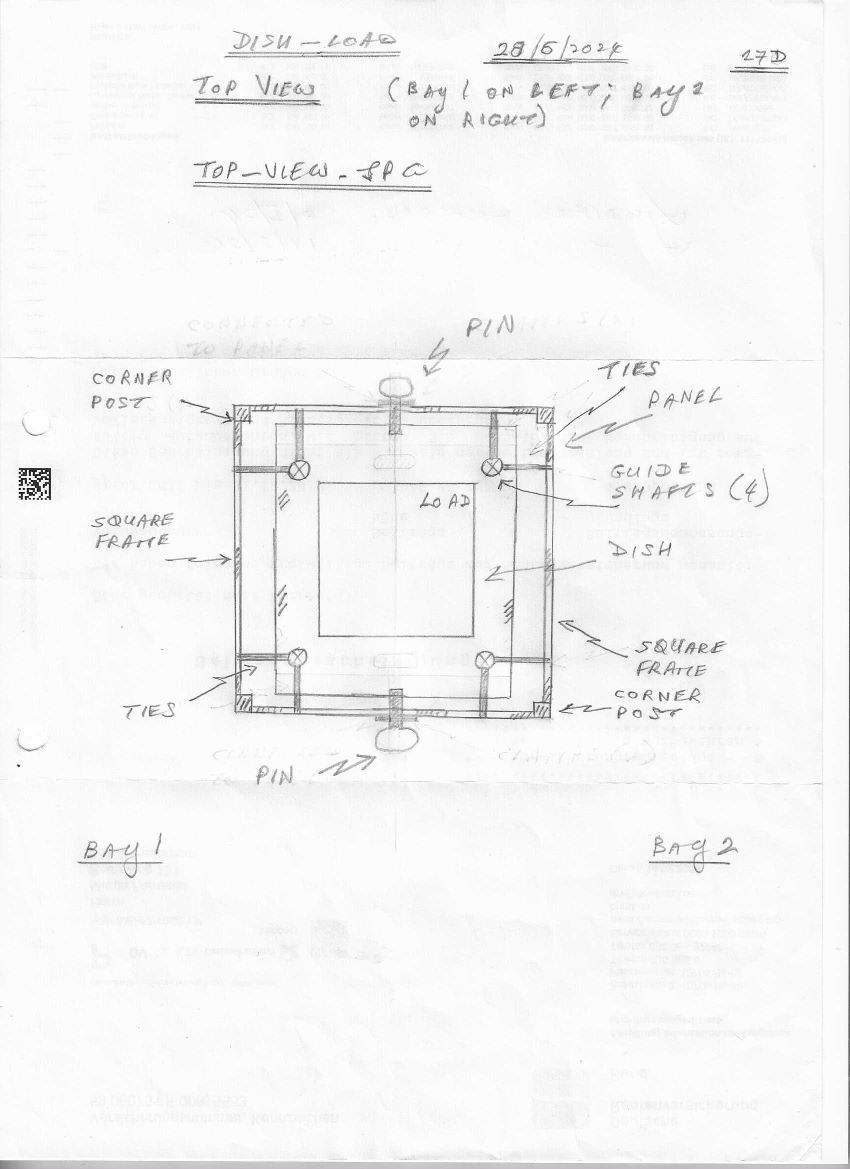
Frame at the very top and around the sides as a square fit.
Frame element below travel of rack or in the middle of the trolley leaving room for the rack to travel through.
The trolley probably needs to be quite tall with a long rack and a long belt to be able to travel a useful distance. The load probably needs to be sizeable as well to transmit enough of its potential energy to the trolley. The springs will also have to be quite big and strong to hold and transmit enough energy to the BPS. Some sort of gearing may be needed for a smooth gradual transmission of the power from the springs (dish) to the rack-pinion-BPS.
The problem now is what are the actual numbers here. What are the relationships between the load, springs, rack travel, belt length, and distance travelled by the trolley along the ground? And do these proportions scale linearly?
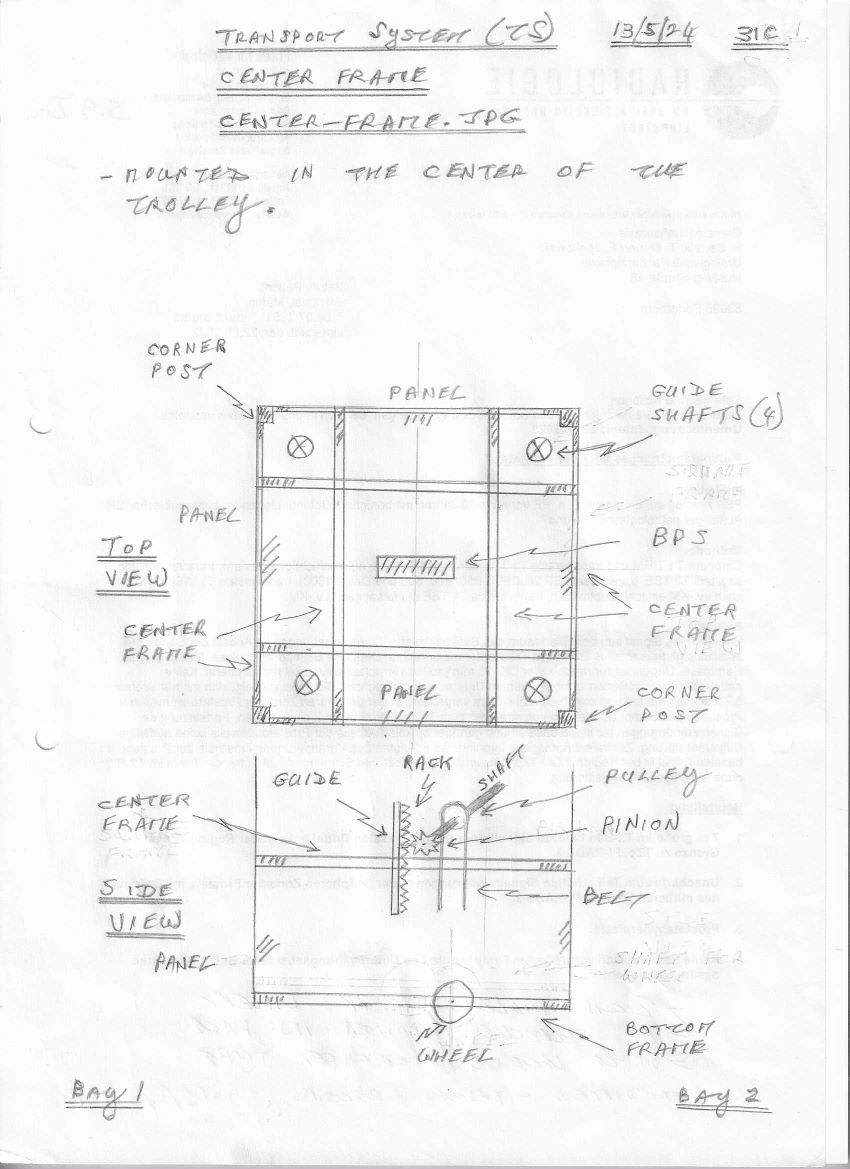
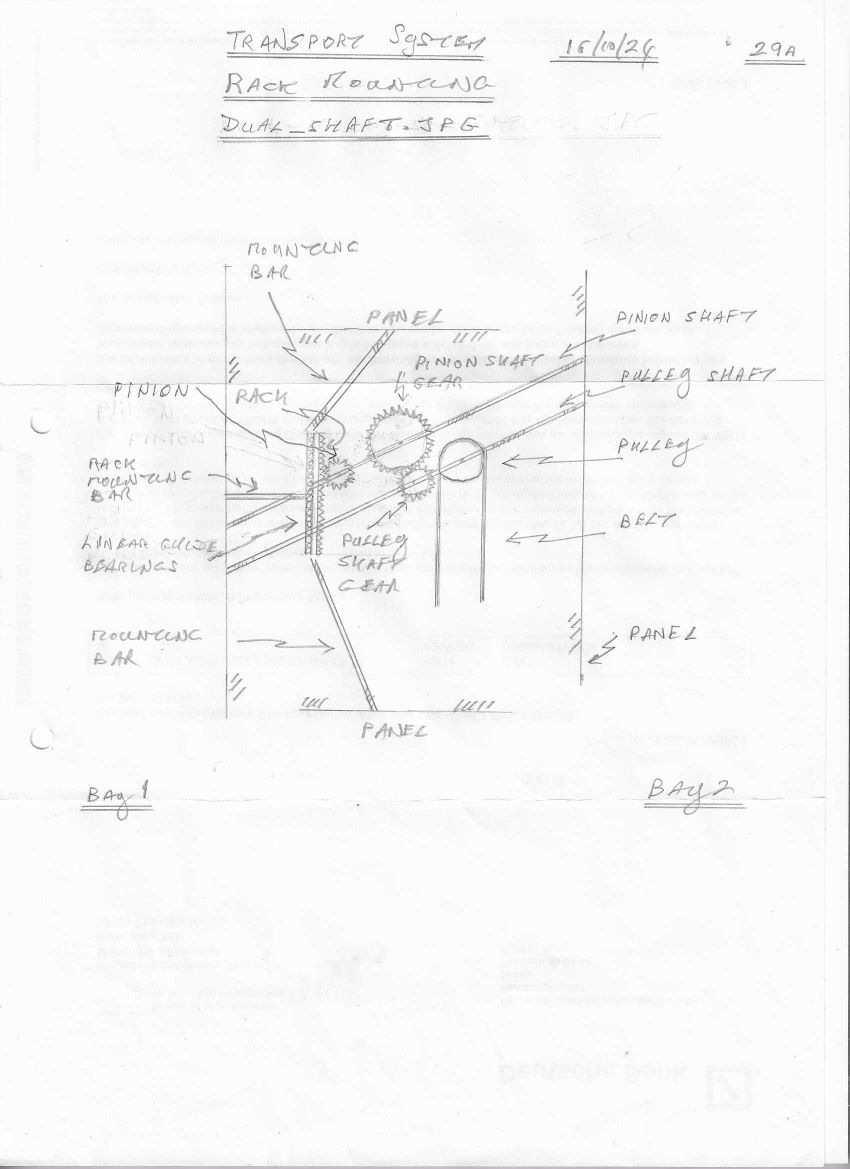
Need to design the gearing at the rack and pinion to evenly transfer power from rack to pinion and then to the drive pulley for the belt. Gears need to withstand the force of the pinion and transfer power slowly to the pulley.
The pinion shaft turns a gear that turns another shaft that drives the pulley. The pulley shaft turns faster than the pinion shaft because the pinion gear is larger than the pulley shaft gear. This means that the dish slowly forces the pulley-belt system downwards thus turning the wheel on the ground faster. This is what a dual-shaft setup between pinion and pulley would look like. (N.B: This idea of multiple shafts has now been scrapped.)
Gear Ratio: A gear ratio that allows for gradual engagement is used. A lower ratio - that is, the drive (pinion) gear is larger than the driven (pulley) gear - provides more torque at the expense of speed, allowing for smoother power transfer.
Adjustable Pinion Position: The pinion mount could be designed so that it engages the rack gradually. How the pinion contacts the rack can then be controlled as needed.
Use a gearbox designed to maintain a constant speed ratio between the gear on the pinion shaft and the gear on the pulley shaft. This can help mitigate the effects of load variations.
How It Works: This system uses two variable-diameter pulleys connected by a belt. As the input speed changes, the pulleys automatically adjust their diameters to maintain a constant speed on the output side.
Advantages: Simple design and effective for various applications. Provides smooth speed transitions.
Springs: Compression or tension springs are used to apply force that moves the pulley halves closer together or farther apart.
Spring Action:
Increasing Load: If the load on the system increases, the tension in the belt may also increase. This additional tension can compress the spring, causing the pulley halves to narrow their effective diameter.
Decreasing Load: Conversely, if the load decreases, the tension in the belt reduces. The spring may expand, allowing the pulley halves to widen, increasing the effective diameter.
Conical or Tapered Pulleys: Each pulley consists of two conical halves. When these halves are adjusted (moved closer together or farther apart), they change the effective diameter where the belt rides.
Belt Placement: The belt wraps around the outer edges of the pulleys. The position of the belt on the pulleys will change depending on the distance between the pulley halves.
How the Spring Mechanism Works
1. Spring Action:
Compression and Expansion: The springs are designed to respond to the tension in the belt. When the belt experiences increased
tension (due to acceleration), the springs compress, which can pull the pulley halves closer together.
Conversely, when the belt tension decreases (during deceleration), the springs can expand, allowing the pulley halves to move apart.
2. Effect on Belt Motion:
Narrowing the Pulleys: When the pulleys are narrowed (due to spring compression), the belt rides higher on the conical surface.
This effectively reduces the diameter, allowing for a lower gear ratio, which helps maintain a constant speed at the output.
Widening the Pulleys: When the pulleys widen (due to spring expansion), the belt rides lower on the conical surface, increasing the diameter. This allows for a higher gear ratio, compensating for reduced input speed.
Mechanical variators with variable-diameter pulleys are versatile components found in diverse applications, from automotive and industrial machinery to home appliances and robotics. Their ability to provide smooth, continuous adjustments in speed makes them valuable in any situation where load conditions change frequently.
Info on and diagrams for Mechanical Variators - Continuously Variable Transmission (CVT)
Use an automatic transmission system that can adjust the gear ratio dynamically based on the speed of the pinion shaft gear. This can involve planetary gear systems that automatically shift to maintain a constant output speed.
Implement a continuously variable transmission (CVT), which allows for a seamless transition between gear ratios. This type of transmission can adapt to changes in the input speed of the pinion shaft gear to keep the pulley shaft gear rotating at a constant speed.
A CVT allows for smooth adjustments to speed without the jolting effect of gear shifts, which is beneficial for a trolley carrying loads. The CVT typically consists of two pulleys and a belt that connects them. The pulleys can change their diameter to vary the gear ratio continuously.
A flywheel is connected to the pulley shaft gear. The flywheel stores kinetic energy, helping to smooth out variations in speed caused by fluctuations in the speed of the pinion shaft gear.
Using a flywheel in a system where one gear drives another one offers several advantages, particularly in maintaining constant speed.
Space Efficiency: Flywheels can provide significant energy storage in a relatively compact design, making them suitable for applications with space constraints.
A paper on Regulating Random Mechanical Motion.
Also a paper on Nonlinear Feedback Control of Underactuated Mechanical Systems.
Need to design and build a much taller prototype that would travel a good distance right from the start or to go with the more workable size chosen in the design so far. I think it is better to work with a smaller design at the beginning. It is more manageable and the system should be fairly easy to scale at a later date when most of the quirks and issues have been cleared.
Some notes on the use of the TS system in a picker in a high-bay warehouse and the first steps in drafting a mathematical model of the TS system.
The rack needs to be connected to the dish and not to the plate.
Go to Introduction
.
{kind=link}
{kind=link}
{kind=link}